|
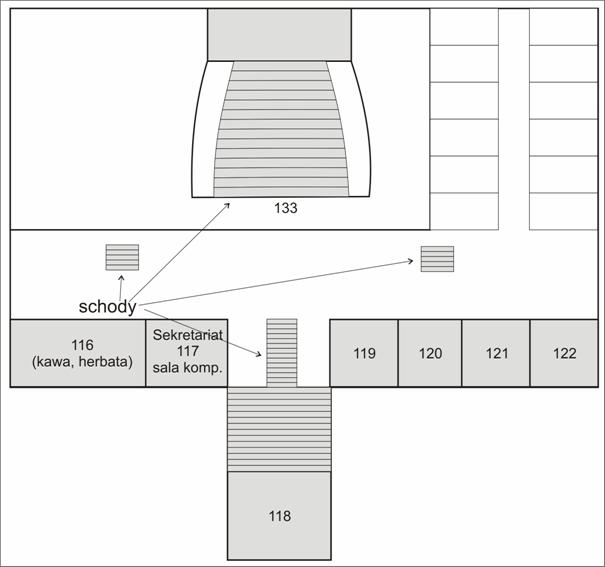
Referaty
wygłaszane są w salach:118, 121, 122 i 133 (rozkład
sal)
na I piętrze Gmachu Elektroniki PW, oraz w Małej
Auli PW
REFERATY PLENARNE
(wg kolejności wygłaszania)
Referat plenarny I - Poniedziałek,
27.06., 10:30, sala: Mała Aula PW
Tadeusz Kaczorek - Układy dodatnie z opóźnieniami
Referat plenarny II - Poniedziałek,
27.06., 11:15, sala: Mała Aula PW
Zdzisław Bubnicki - Zastosowania zmiennych niepewnych w problemach
sterowania systemami komputerowymi
Referat plenarny III -
Poniedziałek, 27.06., 12:15, sala: Mała Aula PW
Leszek Trybus - Systemy sterowania w energetyce
Referat plenarny IV - Wtorek,
28.06., 12:15, sala: Mała Aula PW
Roman Kulikowski - Wspomaganie zarządzania gospodarką opartą na
wiedzy systemowej i teorii sterowania z uwzględnieniem ryzyka
Referat plenarny V - Środa, 29.06., 12:15, sala: E 133
Janusz Kacprzyk - Wieloetapowe sterowanie rozmyte ze stochastycznym
układem sterowanym
Referat plenarny VI - Środa, 29.06., 14:00, sala: E 133
Krzysztof Malinowski - Mechanizmy współpracy: koordynacja periodyczna
i iteracyjna
Referat plenarny VII - Czwartek, 30.06., 12:15, sala: E 133
Michael Athans – Issues on robust adaptive control
I. TEORIA SYSTEMÓW
Przewodniczący: Tadeusz Kaczorek, Irena
Pawłow
Wtorek, 28.06., 09:15, sala: E 133
-
Andrzej Straszak - Automatyka, cybernetyka i
informatyka a systemy
-
Zdzisław Kowalczuk, Mariusz Domżalski -
Asynchroniczna fuzja danych z wielu estymatorów stanu
-
Dominik Sierociuk - Użycie ułamkowego filtru
Kalmana do estymacji parametrów układu ułamkowego rzędu
-
Jerzy Tokarzewski - O zerach, podprzestrzeniach
zerujących wyjście i zerowych dynamikach w układach liniowych
właściwych
-
Bogdan Grzywacz - Koncepcja skalowania czasowego
odpowiedzi układów wielowymiarowych
-
Konrad Markowski - Minimalizacja pary macierzy (A,
B) układu 2D opisanego modelem ogólnym za pomocą grafów oddziaływań
-
Mariusz Kamola - O projektowaniu odpornym na
niedoskonałości modelu numerycznego
-
Przemysław Orłowski - Analiza częstotliwościowa
układu zmiennego w czasie – algorytm i przykłady
II.
TEORIA STEROWANIA
Przewodniczący: Jerzy Józefczyk, Stanisław
Skoczowski
Środa, 29.06., 09:15, sala: E 133
-
Ryszard Gessing (referat problemowy) - Fascynujące
własności układu
z pochodnymi wyższego rzędu w regulatorze
-
Roman Czyba, Marian Błachuta - Zastosowanie
wysokiego rzędu pochodnych
w sterowaniu obiektem nieliniowym
-
Andrzej Królikowski, Tomasz Kubiak, Dariusz Horla -
Sterowanie LQG
z ograniczeniami amplitudy i wariancji sygnału sterującego
-
Ryszard Gessing - Korektor równoległy dla układów z
nieminimalnofazowymi obiektami
-
Rafał Grygiel, Marian Błachuta - Regulacja w
układzie o dwóch stopniach swobody dla obiektów z opóźnieniem
-
Jacek Pieniążek - Struktura mieszana w sterowaniu
obiektem liniowym
z ograniczeniem sygnału wejściowego
-
Włodzimierz Stanisławski, Marek Rydel - Modele
hierarchiczne złożonych obiektów sterowania
-
Krzysztof Czyż - Układy sterowania z
nierównomiernym próbkowaniem sygnałów
III. STEROWALNOŚĆ I OBSERWOWALNOŚĆ
Przewodniczący: Tadeusz Banek, Marian Błachuta
Środa, 29.06., 15:05, sala: E 133
-
Jerzy Klamka (referat problemowy) - Sterowalność
układów dyskretnych typu 2-D
-
Mikołaj Busłowicz - Osiągalność i sterowalność
liniowych układów dyskretnych
z opóźnieniami zmiennych stanu
-
Mikołaj Busłowicz, Tadeusz Kaczorek - Osiągalność
zupełna i sterowanie
z minimalną energią dodatnich układów dyskretnych z opóźnieniami
-
Rafał Kociszewski - Sterowalność dodatnich układów
dyskretnych z jednym opóźnieniem zmiennych stanu
-
Ewa Krasoń - Wyznaczanie zasięgu zbioru
osiągalności dwuwymiarowego ciągło-dyskretnego układu liniowego z
niepewnością typu elipsoidalnego
-
Wojciech Trzasko, Rafał Kociszewski - Sterowalność
dodatnich układów dyskretnych z opóźnieniem od stanu i sterowania
-
Marcin Witczak - Projektowanie obserwatorów stanu
dla dyskretnych w czasie systemów nieliniowych
IV.
STABILNOŚĆ I STABILIZACJA
Przewodniczący: Andrzej Bartoszewicz, Andrzej
Królikowski
Środa, 29.06., 15:05, sala: E 121
-
Wojciech Mitkowski (referat problemowy) - Metody
stabilizacji
-
Mikołaj Busłowicz - Odporna stabilność dodatnich
układów dyskretnych
z opóźnieniem o liniowej strukturze niepewności
-
Andrzej Ruszewski - Obszary D-stabilności układów
regulacji z obiektem pierwszego rzędu z opóźnieniem
-
Andrzej Ruszewski - Obszary stabilności w
przestrzeni parametrów układów regulacji z obiektem wieloinercyjnym z
opóźnieniem
-
Paweł Skruch - Stabilizacja liniowego nieskończenie
wymiarowego systemu oscylacyjnego za pomocą liniowego sprzężenia
zwrotnego od położenia
-
Andrzej Tutaj - Stabilność rozproszonego układu
regulacji z predykcją stanu
-
Krzysztof Oprządkiewicz - Stabilizowalność i
wykrywalność pewnej klasy systemów parabolicznych o niepewnych
parametrach
V.
STEROWANIE OPTYMALNE
Przewodniczący: Maciej Krawczak, Jerzy
Tokarzewski
Czwartek, 30.06., 09:15, sala: E 133
-
Henryk Górecki (referat problemowy) - Od
optymalizacji parametrycznej
do optymalizacji dynamicznej, czyli od ustalonej struktury regulatora
do odkrycia jego nieznanej struktury
-
Maciej Ławryńczuk, Piotr Marusak, Piotr Tatjewski -
Bieżąca optymalizacja punktu pracy procesów regulowanych algorytmem
predykcyjnym
-
Zbigniew Nahorski, Jarosław Stańczak - Optymalny
sygnał typu bang-bang
do estymacji parametru w obiekcie pierwszego rzędu
-
Andrzej Bartoszewicz, Aleksandra Nowacka - Ślizgowe
sterowanie obiektem trzeciego rzędu z nieostrym ograniczeniem sygnału
wejściowego
-
Krzysztof Latawiec, Wojciech P. Hunek - Inwersje
macierzy wielomianowych
a sterowanie minimalnowariancyjne
-
Piotr Suchomski - Struktura dyskretnych algorytmów
optymalnych ze względu
na normę H∞
-
Andrzej Łodziński - Metoda wyboru sterowania
wielokryterialnego procesem wieloetapowym przy użyciu funkcji
osiągnięcia
-
Katarzyna Majewska - Oscylacyjne procesy
czasooptymalne
VI.
OPTYMALIZACJA I PODEJMOWANIE DECYZJI
Przewodniczący:
Michał Inkielman, Wojciech Tarnowski
Wtorek, 28.06., 16:20, sala: E 133
-
Zdzisław Kowalczuk (referat problemowy) -
Wielokryterialna optymalizacja ewolucyjna z preselekcją kwalitatywnych
subkryteriów
-
Dariusz Uciński - Planowanie strategii pomiarowych
w nieliniowych zagadnieniach odwrotnych z zastosowaniem niegładkich
kryteriów optymalności
-
Marek Libura - Uogólnione zagadnienie odwrotne i
całkowitoliczbowość zmiennych w zadaniach programowania liniowego
-
Marek Skowron, Krystyn Styczeń - Algorytm
ewolucyjny globalnej optymalizacji procesów okresowych z
ograniczeniami stabilnościowymi
-
Stanisław Łukasik - Wielokryterialna selekcja
wariantów rozwoju infrastruktury sieciowej
-
Włodzimierz Ogryczak, Tomasz Śliwiński -
Bezpośrednie metody minimaksymalizacji leksykograficznej
VII. STEROWANIE ADAPTACYJNE
Przewodniczący: Mikołaj Busłowicz, Piotr
Kulczycki
Poniedziałek, 27.06., 14:00, sala: E 133
-
Stanisław Bańka (referat problemowy) - O
projektowaniu wielowymiarowych układów adaptacyjnego sterowania
-
Tadeusz Banek, Edward Kozłowski - Adaptacyjne
sterowanie terminalne
z losowym horyzontem
-
Jacek Czeczot - Zasady tworzenia uproszczonego
fizykalnego modelu procesu dla potrzeb sterowania adaptacyjnego
-
Andrzej Dzieliński - Wykorzystanie nierówności
różniczkowych w adaptacyjnym sterowaniu nieliniowym
-
Stefan Domek - Regulacja predykcyjna wybranej klasy
obiektów nieliniowych
z ograniczeniami wejść
-
Dariusz Horla - Optymalizacja wypukła w
zastosowaniu do syntezy adaptacyjnego regulatora predykcyjnego z
niejawnym układem anti-windup
-
Witold Byrski, Marcin Nowak - Zastosowanie funkcji
sklejanych w zadaniu optymalnej identyfikacji, obserwacji stanu i
regulatorze adaptacyjnym
VIII. IDENTYFIKACJA
Przewodniczący: Witold Byrski, Zbigniew
Nahorski
Środa, 29.06., 09:15, sala: E 118
-
Jerzy Świątek (referat problemowy) - Identyfikacja
kompleksów operacji przy ograniczonych możliwościach pomiarowych
-
Ewa Bielińska - Identyfikowalność elementarnych
modeli biliniowych
-
Jarosław Figwer - Identyfikacja modeli Wienera z
wykorzystaniem wielosinosoidalnych losowych sygnałów pobudzających
-
Jarosław Figwer, Krzysztof Czyż - Identyfikacja
modeli ciągłych obiektów dynamicznych z nierównomiernie próbkowanymi
sygnałami
-
Zygmunt Hasiewicz, Grzegorz Mzyk - Nieparametryczne
metody estymacji
i identyfikacji parametrów systemów nieliniowych
-
Wiesław Krajewski - Zadanie upraszczania modeli
jako problem interpolacyjny
-
Piotr Ostalczyk, Radosław Cisz - Identyfikacja
niecałkowitego rzędu pochodnej równania Bagley’a-Torvika
-
Rafał Stanisławski, Krzysztof Latawiec - Rekursywna
identyfikacja obiektów wielowymiarowych z wykorzystaniem funkcji bazy
ortonormalnej
IX.
IDENTYFIKACJA I ROZPOZNAWANIE
Przewodniczący: Leszek Rutkowski, Dariusz
Uciński
Środa, 29.06., 15:05, sala E 118
-
Mirosław Bereziński - Czynniki informacji i ryzyka
w identyfikacji postaci modelu matematycznego
-
Adam Piłat - Identyfikacja masy obiektu w
zawieszeniu magnetycznym
-
Robert Brzezki, Józef Ober - Identyfikacja
biometryczna realizowana na podstawie ruchu oka
-
Teresa Główka - Identyfikacja on-line w układzie
aktywnego tłumienia hałasu – nowa metoda z dziedziny widm wyższych
rzędów
-
Jerzy Kasprzyk - Identyfikacja modeli dla celów
aktywnego tłumienia hałasu
-
Paweł Buczyński - Percepcyjna przestrzeń kolorów w
przetwarzaniu i analizie obrazów komputerowych
-
Dominika Gutowska, Longin Stolc - Identyfikacja
osób na podstawie cech twarzy
z zastosowaniem logiki rozmytej
-
Sławomir Skoneczny - Poprawa kontrastu w
zastosowaniu do przetwarzania obrazów szarościowych
X.
STEROWANIE KOMPLEKSAMI OPERACJI
Przewodniczący: Marek Libura, Włodzimierz
Ogryczak
Poniedziałek, 27.06., 16:40, sala: E 118
-
Jerzy Józefczyk (referat problemowy) - Odporne
algorytmy podejmowania decyzji dla wybranych przypadków alokacji i
szeregowania zadań w warunkach niepewności
-
Adam Gałuszka, Andrzej Świerniak - Redukcja systemu
STRIPS z uwzględnieniem niepełności informacji do zadania
programowania liniowego
-
Tomasz Śliwiński, Eugeniusz Toczyłowski - Algorytm
harmonogramowania zadań podzielnych na maszynach równoległych przy
uwzględnieniu przezbrojeń
i ograniczeń zasobowych
-
Jerzy Józefczyk - Nowe problemy i algorytmy
szeregowania zadań na ruchomych realizatorach
-
Wojciech Thomas - Hybrydowy algorytm szeregowania
zadań na ruchomych realizatorach dla kryterium średniego czasu
przepływu
-
Paweł Sitek, Jarosław Wikarek, Zbigniew Banaszak -
Zastosowanie programowania z ograniczeniami do wariantowania obsługi
zleceń produkcyjnych w MŚP
-
Robert Wójcik, Krzysztof Bzdyra, Zbigniew Banaszak -
Zastosowanie technik programowania z ograniczeniami w zadaniach
rozstrzygania konfliktów zasobowych
XI.
METODY STOCHASTYCZNE
- PROBLEMY NIEDETERMINISTYCZNE
Przewodniczący: Ryszard Gessing, Ireneusz
Jóźwiak
Poniedziałek, 27.06., 14:00, sala: E 118
-
Olgierd Hryniewicz (referat problemowy) - Wybór
zmiennych w analizie systemowej – zastosowanie statystycznych metod
badania zależności
z wykorzystaniem nieprecyzyjnych danych
-
Grzegorz Bialic, Marian Błachuta - Zastosowanie
modelu inercyjnego
z opóźnieniem do oceny jakości tłumienia zakłóceń stochastycznych w
układach
z regulatorami dyskretnymi PID
-
Ryszard Koniewski - Rozproszona symulacja
stochastycznych sieci Petriego
-
Donat Orski - Zastosowanie zmiennych niepewnych do
podejmowania decyzji dla obiektu o strukturze równoległej
-
Longin Stolc - Niedeterministyczne układy równań w
analizie sterowania systemami produkcyjnymi. Cz.1 – Liniowe
zagadnienia przedziałowe i rozmyte
-
Longin Stolc - Niedeterministyczne układy równań w
analizie sterowania systemami produkcyjnymi. Cz.2 – Liniowe
zagadnienia stochastyczne
-
Tadeusz Wacławski - Zmiennostrukturalne sterowanie
rozmyte układem dynamicznym o właściwościach oscylacyjnych
XII. SZTUCZNA INTELIGENCJA I
Przewodniczący: Adam Grzech, Wiesław Traczyk
Poniedziałek, 27.06., 14:00, sala: E 121
-
Leszek Rutkowski, Agata Pokropińska, Robert Nowicki
(referat problemowy) - Linie izokryterialne: nowa metoda
projektowania systemów rozmytych
-
Bogdan Wilamowski (referat problemowy) - Implementation of Methods
of Computational Intelligence
-
Danuta Rutkowska - Sieci rozmytoneuronowe do
sterowania: architektury typu RBF i MLP – system NEFCON
-
Marcin Jastrzębski - Rozmyte modelowanie tarcia
przy pomocy algorytmu pseudo-bakteryjnego i metody najmniejszych
kwadratów
-
Maciej Krawczak - Uczenie sieci neuronowych jako
zadanie wieloetapowego sterowania optymalnego
-
Krzysztof Patan - Warunki stabilności dynamicznej
sieci neuronowej
-
Marcin Relich, Mirosław Galicki - Ciągłe
rekurencyjne sztuczne sieci neuronowe
i ich zastosowanie w identyfikacji obiektów dynamicznych
XIII. SZTUCZNA INTELIGENCJA II
Przewodniczący: Danuta Rutkowska, Roman
Śmierzchalski
Poniedziałek, 27.06., 16:40, sala: E 121
-
Józef Korbicz (referat problemowy) - Niepewność
modeli sztucznej inteligencji
w układach diagnostyki procesów
-
Wiesław Traczyk - Wnioskowanie na podstawie wiedzy
o postaci tekstowej
-
Paweł Rotter, Andrzej M. Skulimowski - Sprzężenia
informacyjne i aproksymacja preferencji w systemach wyszukiwania
obrazów
-
Paweł Wnuk - Genetyczna optymalizacja struktury
modelu TSK na przykładzie siłownika pneumatycznego
-
Janusz Papliński - Estymacja zmiennego opóźnienia w
układach dynamicznych
za pomocą algorytmów ewolucyjnych
-
Adam Niewiadomski, Michał Bartyzel, Piotr S.
Szczepaniak - Podsumowania lingwistyczne w ocenianiu algorytmów
zautomatyzowanego egzaminowania
na odległość
-
Hanna Bury, Dariusz Wagner - Interpretacja ocen
ekspertów przy użyciu profili Saariego
XIV. SYSTEMY STEROWANIA
Przewodniczący: Stanisław Bańka, Tadeusz Skoczkowski
Czwartek, 30.06., 09:15, sala: E 118
-
Piotr Tatjewski (referat problemowy) - Regulacja
predykcyjna w warstwowych strukturach sterowania
-
Sebastian Plamowski, Piotr Tatjewski - Wdrażanie
zaawansowanych układów regulacji w strukturze przełączanej
-
Andrzej J. Marusak - Optymalne aproksymatory
opóźnienia układów ciągłych oraz ich realizacje cyfrowe i analogowe
-
Małgorzata I. Michalczyk - Dobór kroku adaptacji
dla algorytmu FX-LMS
-
Małgorzata I. Michalczyk - Adaptacyjne algorytmy
sterowania dla przestrzennych stref ciszy
-
Marek Pawełczyk - Optymalny układ sterowania do
generacji stref ciszy
w żądanym położeniu
-
Marcin Chodźko, Krzysztof Marchełek, Arkadiusz Parus -
Sterowanie eliminatorem drgań samowzbudnych z wykorzystaniem
wewnętrznego modelu zakłóceń
-
Marcin Leszczyński, Michał Syfert - Aplikacja
systemu sterowania tolerującego uszkodzenia dla stanowiska
laboratoryjnego walczaka
XV.
STEROWANIE I TECHNIKA KOMPUTEROWA
Przewodniczący: Wojciech Grega, Jarosław Figwer
Poniedziałek, 27.06., 16:40, sala: E 133
-
Adam Grzech (referat problemowy) - Sterowanie
ruchem w pakietowych sieciach komputerowych dla zapewnienia jakości
usług
-
Piotr Kulczycki, Jacek Waglowski - Optymalny układ
stacji bazowych bezprzewodowego systemu transmisji danych LMDS
-
Ireneusz J. Jóźwiak, Wojciech Laskowski -
Zastosowanie gry symulacyjnej do analizy bezpieczeństwa systemów
informatycznych
-
Magdalena Turowska - Sterowanie przeciążeniem w
sieci ATM w warunkach niepewności
-
Tomasz Dębicki - Zastosowanie zmiennych niepewnych
i losowych w problemie sterowania alokacją zadań w systemie
wieloprocesorowym
-
Michał Karpowicz, Ewa Niewiadomska-Szynkiewicz, Adam
Kozakiewicz - Realizacja systemu sterowania ochroną
przeciwpowodziową w środowisku gridów obliczeniowych
-
Karol Grandek, Andrzej Gacek - UML-owy model
systemu nadzorowania transmisji danych przez sterownik
XVI. TECHNIKA SYSTEMÓW – DIAGNOSTYKA
Przewodniczący: Zdzisław Kowalczuk, Paweł
Lindstedt
Wtorek, 28.06., 09:15, sala: E118
-
Paweł Lindstedt, Paweł Ostapkowicz - Zastosowanie
elementów korekcyjnych automatyki w diagnostyce obiektów
technicznych
-
Michał Syfert, Paweł Rzepiejewski, Paweł Wnuk, Jan
Maciej Kościelny - System bieżącej diagnostyki stacji
wyparnej
-
Paweł Wnuk, Michał Syfert - Diagnostyka procesów w
strukturze zdecentralizowanej
-
Jan Maciej Kościelny, Michał Bartyś - Problem
uszkodzeń wielokrotnych
w diagnostyce procesów przemysłowych
-
Edward Michalewski - Blok analizy diagnostycznej
pakietu Diana jako źródło wiedzy
-
Dariusz Szewczyk - Optymalne rozmieszczenie
czujników pomiarowych dla liniowego układu o parametrach rozłożonych
-
Jerzy Respondek - Aproksymacyjna sterowalność
układów mechanicznych
-
Jan W. Owsiński, Andrzej Gutkiewicz - Prosty system
indeksowania i klasyfikacji dokumentów w obrębie określonej dziedziny
XVII. APARATURA AUTOMATYKI
Przewodniczący: Andrzej Dzieliński, Piotr
Tatjewski
Środa, 29.06., 09:15, sala: E 121
-
Tadeusz Missala - Urządzenie/system automatyki jako
system związany
z bezpieczeństwem
-
Zbigniew Świder, Leszek Trybus - Zdalne strojenie
częstotliwościowe regulatorów przemysłowych
-
Krzysztof B. Janiszowski - Zmniejszenie wpływu
ograniczeń elementu wykonawczego w układach z regulatorem PID poprzez
dynamiczną modyfikację wartości zadanej
-
Zbigniew Pietrusiński - Struktura i właściwości
funkcjonalne modułowo aparatowego systemu automatyki MASAP
-
Paweł Piątek - Sterowanie magnetycznym zawieszeniem
z wykorzystaniem szybkich sterowników opartych na technologii FPGA
-
Jakub Takosoglu, Ryszard Dindorf - Sterowanie
rozmyte serwonapędu elektropneumatycznego
-
Jan Leszczyński - Metoda syntezy regulatora
dyskretnego
-
Wojciech Trzasko - Dydaktyczne laboratorium
sterowników przemysłowych
XVIII. ROBOTY I
Przewodniczący: Krzysztof Kozłowski, Krzysztof
Tchoń
Poniedziałek, 27.06., 14:00, sala: E 122
-
Edward Jezierski (referat problemowy) - Sterowanie
impedancyjne robotów
z napędami pneumatycznymi
-
Andrzej Englot, Aleksander Mazgaj - Modernizacja
sterowania robota IRb-6
-
Mieczysław Zaczyk - Regulatory rozmyte w sterowaniu
robota przemysłowego IRb-6
-
Jerzy Garus - Ocena zdolności układu napędowego
robota podwodnego do wytwarzania zadanych sterowań
-
Paweł Łaski, Ryszard Dindorf - Badanie modelowe
manipulatora elektropneumatycznego typu tripod
-
Piotr Szynkarczyk, Sebastian Pawłowski, Tomasz
Krakówka, Rafał Czupryniak, Stanisław Nycz, Michał Kulawiec, Mariusz
Kozak, Sławomir Kapelko, Adam Andrzejuk - Robot antyterrorystyczny
– wybrane zagadnienia konstrukcyjne
XIX. ROBOTY II
Przewodniczący: Krzysztof Janiszowski, Tadeusz
Missala
Poniedziałek, 27.06., 16:40, sala: E 122
-
Krzysztof Kozłowski, Dariusz Pazderski, Marcin
Kiełczewski - Stabilizacja do punktu dwukołowego robota mobilnego z
wykorzystaniem algorytmów zmiennych w czasie
-
Maciej Michałek, Krzysztof Kozłowski - Sterowanie
nieholonomicznym systemem łańcuchowym metodą orientowania pola
wektorowego
-
Krzysztof Tchoń, Janusz Jakubiak - Powtarzalny
algorytm kinematyki odwrotnej dla podwójnie nieholonomicznych
manipulatorów mobilnych
-
Cezary Wildner, Jerzy E. Kurek - Identyfikacja
modelu robota za pomocą rekurencyjnych sieci neuronowych – synteza
układu sterowania robota
-
Artur Babiarz - Nowe kryterium przeszukiwania w
metodzie bazującej na algorytmie PRM
-
Andrzej Żak - Modelowanie dynamiki robotów
podwodnych
XX.
ZASTOSOWANIA TECHNICZNE I
Przewodniczący: Andrzej Dębowski, Leszek Trybus
Wtorek, 28.06., 09:15, sala: E 121
-
Zbigniew Kowalski, Marcin Drewka (referat problemowy)
- Układy automatyki statku oraz metody wspomagania ich
projektowania
-
Ryszard Arendt, Andrzej Kopczyński, Marcin Wojtczak -
Zastosowanie modeli matematycznych przy projektowaniu steru
strumieniowego i napędu elektrycznego statku
-
Ryszard Arendt, Marian Kostrzewski, Zbigniew Kowalski,
Ewa van Uden - Struktura i wybrane procedury systemu z bazą wiedzy
do projektowania automatyki podsystemów energetycznych statków
-
Piotr Borkowski, Zenon Zwierzewicz - Algorytm
stabilizacji kursu statku w oparciu o komputerowy model dynamiki
-
Witold Gierusz - Sterowanie precyzyjne statkiem za
pomocą wielowymiarowych regulatorów odpornych
-
Andrzej Łebkowski, Roman Śmierzchalski, Marcin
Tobiasz, Krzysztof Dziedzicki, Mirosław Tomera - System
bezpiecznego i optymalnego sterowania statkiem na morzu
-
Andrzej Łebkowski, Roman Śmierzchalski, Mirosław
Tomera - Modelowanie obszarów niebezpiecznych i pogodowych w
procesie wyznaczania trasy przejścia statku
-
Józef Małecki - Symulacja precyzyjnego ruchu okrętu
XXI. ZASTOSOWANIA TECHNICZNE II
Przewodniczący: Jan M. Kościelny, Jan
Leszczyński
Wtorek, 28.06., 09:15, sala: E 122
-
Roman Śmierzchalski - Problemy automatyzacji
systemu elektroenergetycznego statku
-
Marcin Tobiasz, Mirosław Tomera, Andrzej Łebkowski,
Krzysztof Dziedzicki, Roman Śmierzchalski - Regulator trajektorii w
aspekcie sterowania statkiem w sytuacji kolizyjnej
-
Anna Witkowska, Mirosław Tomera, Roman Śmierzchalski -
Zastosowanie metody backstepping do sterowania ruchem statku
-
Grażyna Barna - Matematyczny model pojazdu
szynowego dla celów projektowania i testowania układów wykrywania i
likwidacji poślizgu przy hamowaniu
-
Arkadiusz Warmus, Janusz Baran - Zdalne sterowanie
modelem pojazdu
z wykorzystaniem kamery USB i oprogramowania IMAQ Vision
-
Robert Głębocki - Wybrane problemy sterowania lotem
przestrzennym inteligentnych pocisków moździerzowych
-
Robert Głęboki, Ryszard Vogt - Analiza metod
sterowania małych obiektów latających
-
Maciej Rosół, Przemysław Gorczyca - Sterowanie
rozproszone laboratoryjnym modelem helikoptera
XXII. ZASTOSOWANIA TECHNICZNE III
Przewodniczący: Krzysztof Latawiec, Eugeniusz
Toczyłowski
Środa, 29.06., 09:15, sala: E 122
-
Krzysztof Bartecki, Ryszard Rojek -
Neuronowo-adaptacyjne sterowanie procesem wymiany ciepła
-
Wojciech Grega - Sterowanie modelem nagrzewnicy
powietrza przez sieć Ethernet
-
Tadeusz Skoczkowski, Marian Kalus - Regulacja
neuro-rozmyta temperatury stalowej rury w procesie nagrzewania i
wyżarzania indukcyjnego
-
Dariusz Tomkiewicz - Sterowanie
minimalnowariancyjne procesem suszenia konwekcyjnego
-
Krzysztof Dziedzicki, Roman Śmierzchalski -
Optymalizacja produkcji elektrociepłowni współpracującej z miejską
siecią ciepłowniczą
-
Tomasz Szczygieł - Sterowanie kompensacją mocy
biernej w systemach elektroenergetycznych w ujęciu programowania w
logice z ograniczeniami
-
Mieczysław A. Brdyś, Michał Grochowski, Kazimierz
Duzinkiewicz, Piotr Deinrych, Jingsong Wang - Miękko przełączane
sterowanie predykcyjne w zastosowaniu do systemów ściekowych
-
Kazimierz Duzinkiewicz, Arkadiusz Cimiński -
Modelowanie sieci wodociągowych – podejście do problemu szkieletyzacji
XXIII. ZASTOSOWANIA TECHNICZNE IV
Przewodniczący: Zbigniew Banaszak, Zbigniew
Kowalski
Środa, 29.06., 15:05, sala: E 122
-
Agnieszka Brzezińska, Tadeusz Stefański - Regulacja
prędkości kątowej silnika indukcyjnego z niesztywnym zamocowaniem masy
obciążenia z zastosowaniem regulatora neuronowego
-
Tadeusz Stefański, Agnieszka Brzezińska - Problem
tłumienia oscylacji w stanie nieustalonym układu silnik
indukcyjny-masa obciążenia
-
Wojciech J. Klimasara, Marek Ludwiński, Marek Pachuta,
Zbigniew Pilat, Marcin Słowikowski - Stanowisko pomiarowe z
manipulatorem portalowym do badań właściwości i parametrów skanerów
laserowych
-
Zygmunt Kuś - Zastosowanie regulatora adaptacyjnego
dla zasilaczy odbiorników łukowych przy zmiennym przepływie gazu
plazmotwórczego
-
Bogdan Broel-Plater - Sterowanie rozmyte pracą
wtryskarki tworzywa sztucznego
-
Andrzej Dębowski, Wojciech Błasiński, Andrzej
Potapczyk - Zintegrowany układ sterowania turbosprężarką napędzaną
przez turbinę parową
-
Konrad Gromaszek - Sterowanie zespołem krajalnic.
Regulacja predykcyjna
i modelowanie
-
Marek Kęciek, Tomasz Kleniewski, Wiesław Kopacz,
Zbigniew Pilat, Andrzej Szawłowski - Modyfikacje w sterowaniu i
technologii celem zwiększenia wydajności zautomatyzowanego montażu
zespołów nitowanych
XXIV. ZASTOSOWANIA TECHNICZNE V
Przewodniczący: Edward Jezierski, Tadeusz
Stefański
Czwartek, 30.06., 09:15, sala: E 121
-
Jacek Korniak, Ryszard Rojek - Aspekt energetyczny
sterowania rozmytego samochodowym układem napędowym
-
Aleksander Jastriebow, Stanisław Gad, Grzegorz Słoń,
Dariusz Kałwa, Mariusz Łaskawski - Metody sztucznej inteligencji w
diagnostyce wyposażenia elektrycznego samochodów
-
Sebastian Chamera, Igor Maciejewski, Tomasz Krzyżyński
- Modelowanie
i symulacja aktywnego systemu wibroizolacji siedziska samochodu
ciężarowego przy sterowaniu konwencjonalnym i rozmytym
-
Zenon Ociepa - Interakcyjne programowanie systemu
sterowania procesem formowania szyb samochodowych
-
Piotr Zaporski, Wojciech Tarnowski - Modelowanie
pomieszczeń bytowych do celów sterowania klimatem
-
Wojciech Szydełko - Przesyłanie głosu w sieci LON z
zastosowaniem w automatyce budynku
-
Wojciech Kozłowski - Algorytm aproksymacji
brakujących pomiarów
w modelowaniu procesów geostatystycznych
-
Piotr Arabas, Krzysztof Malinowski - Hierarchiczny
system obrony przeciwrakietowej – porównanie strategii koordynacji
XXV. ZASTOSOWANIA NIETECHNICZNE
Przewodniczący: Andrzej Straszak, Jerzy Świątek
Czwartek, 30.06., 09:15, sala: E 122
-
Antoni Niederliński (referat problemowy) -
Automatyzacja wnioskowania prawniczego
-
Lech Kruś - Problemy konstrukcji komputerowych
systemów wspomagających zarządzanie kapitałami z uwzględnieniem ryzyka
-
Krzysztof Fleszar, Eugeniusz Toczyłowski -
Algorytmy przybliżonego rozwiązywania problemu aukcji kombinatorycznej
-
Mariusz Kaleta, Eugeniusz Toczyłowski - Analiza
parametryczna kosztów ograniczeń zasobowych podczas bilansowania rynku
lokalnego
-
Piotr Pałka, Eugeniusz Toczyłowski, Izabela Żółtowska
- Mechanizmy bilansowania ofert na lokalnym rynku energii przy
wypukłych funkcjach kosztów
-
Kamil Smolira, Eugeniusz Toczyłowski - Struktura
rynkowych mechanizmów czasu rzeczywistego w systemach rozproszonych
-
Mirosław Bereziński, Michał Inkielman, Dariusz Wagner
- Sieciowy stochastyczny model procesu kształcenia w szkole wyższej
-
Maciej Romaniuk, Tatiana Ermolieva - Zastosowanie
metod symulacyjnych
w problematyce obrotu obligacjami katastroficznymi
XXVI. MODELOWANIE, OPTYMALIZACJA I STEROWANIE DLA OŚRODKÓW SPRĘŻYSTYCH
Przewodniczący: Zygmunt Hasiewicz, Jerzy Klamka
Wtorek, 28.06., 16:20, sala: E 118
-
Łukasz Bartkowiak, Irena Pawłow - Problem separacji
faz w stopach sprężystych
-
Sławomir Czarnecki - Implementacja numeryczna
algorytmu optymalizacji globalnej bazującego na teorii krzywej Peano
-
Andrzej Myśliński - Optymalizacja kształtu
termolepkosprężystych sprzężonych zagadnień kontaktowych
-
Jan Sokołowski, Antoni Żochowski - Zwarta
modyfikacja formy energii i pochodna topologiczna w zagadnieniach
kontaktowych
Pokaz robotów mobilnych
Środa, 26.06., 17:45, Gmach Elektroniki, I piętro,
korytarz
|



{kind=link}